
"Nada é permanente, exceto a mudança."- Heráclito
Sistemas de treino robótico
Os sistemas robóticos de membros superiores que existem podem ser classificados em sistemas passivos (membros estabilizadores), sistemas ativos (atuadores movendo membros) e sistemas interativos. Estes últimos são equipados com atuadores, bem como com estratégias de controlo para permitir reagir a ações do paciente.
Um dos primeiros sistemas de reabilitação robótica para treinamento de membros superiores após AVC é o MIT-MANUS desenvolvido por Krebs et al (2004). Ele permite treinar movimentos de pulso, cotovelo e ombro, movendo-se para alvos, rastreamento de figuras e treinamento de realidade virtual orientada para a tarefa. Pacientes com todos os níveis de força muscular podem usar o sistema. O feedback visual, tátil e auditivo durante o movimento é fornecido. O MIT-MANUS demonstrou melhorar a função motora na extremidade superior hemiparética dos pacientes.

O MIME (Mirror Image Movement Enhancer) aplica forças de assistência ou resistência, conforme necessário, à mão de um paciente através de uma pega que está conectada à extremidade efetora do robô. Este tratamento do robô focaliza na função do ombro e do cotovelo. O sistema MIME pode trabalhar em posições de orientação e posição pré-programadas. Também pode ser usado em uma configuração onde o braço afetado deve realizar um movimento espelhado do movimento definido pelo braço intacto. O antebraço pode ser posicionado em uma grande variedade de posições e tem, portanto, a possibilidade de deixar o paciente exercer em padrões de movimento complexo.
BI-MANU-TRACK, projetado por Hesse et al. (2003) para treinar a pro supinação do antebraço e a flexão ou extensão do punho. O treinamento é feito bilateralmente em um modo de treinamento passivo ou ativo. Nenhum feedback é dado ao paciente.


BATRAC (Whitall, Waller, Silver, & Macko, 2000)é um aparelho composto de 2 alças de barra em T independentes que podem ser movidas pelas mãos do paciente em um plano horizontal. O treinamento repetitivo do braço bilateral é apoiado por rítmicos e, quando necessário, por auxílio de movimento. Nenhum feedback do paciente é fornecido.
ARMin (Nef, Mihelj & Riener, 2007) é um semi-exoesqueleto para movimento no ombro, cotovelo, antebraço e pulso. Os sensores de posição, força e torque proporcionam terapia de braço paciente-cooperativa, apoiando o paciente quando suas habilidades para se mover são inadequadas. A combinação de um sistema háptico com um visor audiovisual é usada para apresentar a tarefa de movimento ao paciente.


No NeReBot (Fanin, Gallina, Rossi, Zannatta & Masiero, 2003), a extremidade de cada fio é ligada ao braço do paciente, apoiando o antebraço. Assim é armazenado no sistema o movimento desejado, movendo o braço do paciente em um modo de "fase de aprendizagem". Fornece feedback auditivo e feedback visual, que compreende uma interface gráfica que proporciona uma imagem 3D de um membro superior virtual em que 3 setas mostram a direcção de movimento desejado durante o movimento.
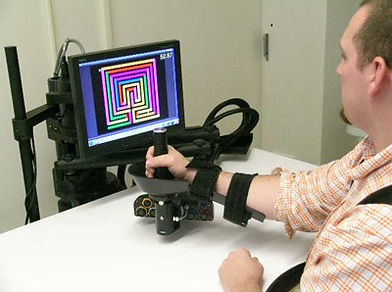
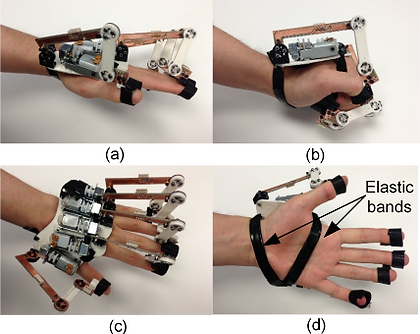
T-WREX foi desenvolvido por Reinkensmeyer et al (2002). Uma órtese adicional pode ser usada para auxiliar no movimento do braço através de um espaço de trabalho grande, embora não totalmente funcional, com faixas elásticas para contrabalançar o peso do braço. Isto o torna adequado para uso em pacientes com baixa força muscular. Possuem sensores de posição e sensores de aperto que permitem feedback sobre o movimento e a força de preensão. O T-Wrex pretende oferecer formação de atividades, por exemplo, fazer compras, partir os ovos, lavar o braço, comer ou fazer limonada.


As soluções Bioness incluem sistemas de estimulação elétrica funcional, sistemas robóticos e programas de terapia baseados em software que proporcionam benefícios funcionais e terapêuticos para indivíduos afetados por distúrbios do sistema nervoso central e lesões ortopédicas.
Haptic Master (Loureiro, Topping, Driessen & Harwin, 2003) é um robô equipado com sensores de força e posição que tem sido usado para treinar movimentos de braço de pacientes com AVC. Todos os exercícios acontecem em um ambiente virtual. É fornecido feedback de desempenho e o terapeuta pode criar tarefas virtuais. Três modos de terapia diferentes podem ser implementados: o modo paciente passivo, o modo assistido ativo do paciente e o modo ativo do paciente.

Sistemas de treinamento de mão virtual baseados na realidade que foram desenvolvidos por Burdea et al. (2002) são Rutgers Master II glove e glove Cyber. Os pacientes podem praticar fazendo quatro tipos de exercícios para a mão no computador. Cada programa concentra-se em diferentes aspetos do movimento da mão: amplitude de movimento, velocidade de movimento, movimento ou fortalecimento individual do dedo. Os exercícios visam ter um componente orientado a tarefa (por exemplo, agarrar bola virtual, piano) mas são principalmente analíticos. Os pacientes recebem feedback háptico simultâneo, visual, auditivo sobre o desempenho do exercício e também sobre a velocidade, alcance e força.
O LiteGait pode ser usado para treinar o equilíbrio em posições de pé ou sentadas, ou mesmo enquanto caminha. O dispositivo evita quedas e auxilia na recuperação da postura e equilíbrio e esta tarefa pode ser repetida com suspensão mínima. Esta rotina é repetida muitas vezes com uma redução gradual na quantidade de apoio fornecido, permitindo assim que a assistência fornecida pelo LiteGait seja gradualmente substituída pela função de retorno do paciente. O feedback sobre as respostas desejadas pode ser fornecido ao paciente.


A UniTherapy (Johnson, Feng, Johnson & Winters, 2007) é uma ferramenta de neuroreabilitação assistida por computador para avaliação e reabilitação da função de extremidade superior em pacientes de acidente vascular cerebral. Faz uso de um joystick de força-feedback, uma plataforma de terapia de joystick modificada (TheraJoy) e um volante de força-feedback (TheraDrive). UniTherapy fornece sinais visuais e auditivos em resposta ao sucesso ou fracasso.
O equipamento de repetição robotizado substitui o reflexo humano pela precisão de um computador e sincroniza dois movimentos: um atuador dá uma pequena martelada no tendão do pulso, enquanto que o estimulador magnético transcraniano cria o sinal no córtex motor do cérebro. Estas respostas enviam um sinal potente de volta ao braço que induz assim ao movimento do pulso.
Este aparelho é ainda compatível com equipamentos de ressonância magnética, permitindo assim estudar o cérebro durante a reabilitação, o que dá possibilidade de melhorar as terapias e o nível de precisão da automatização.
Referências:
-
Boian R.S.A., Han C., Merians A., Burdea C., Adamovich D., Recce M., Tremaine M., & Poizner H. (2002). Virtual Reality-Based Post-Stroke Hand Rehabilitation. In Medicine Meets Virtual Reality, 64-70.
-
Burns, S. P., & Betz, K. L. (1999). Seating pressures with conventional and dynamic wheelchair cushions in tetraplegia. Archives of physical medicine and rehabilitation, 80(5), 566-571.
-
Fanin C., Gallina P., Rossi A., Zannatta U., & Masiero S. (2003). Nerebot: a wire-based robot for neurorehabilitation. 8th International Conference of Rehabilitation Robotics ICORR, 23-27.
-
Fasoli S.E., Krebs H.I., & Hogan N. (2004). Robotic technology and stroke rehabilitation: translating research into practice. Top Stroke Rehabil, 11(4), 11-19.
-
Hesse S., Schulte-Tigges G., Konrad M., Bardeleben A., Werner C. (2003). Robot-assisted arm trainer for the passive and active practice of bilateral forearm and wrist movements in hemiparetic subjects. Arch Phys Med Rehabil, 84(6), 915-920.
-
Johnson, M. J. (2006). Recent trends in robot-assisted therapy environments to improve real-life functional performance after stroke. Journal of NeuroEngineering and Rehabilitation.
-
Johnson M.J., Feng X., Johnson L.M., & Winters J.M. (2007). Potential of a suite of robot/computer-assisted motivating systems for personalized, home-based, stroke rehabilitation. Journal of Neuroengineering and Rehabilitation, 4(6).
-
Nef T., Mihelj M., & Riener R. (2007). ARMin: a robot for patient-cooperative arm therapy. Med Biol Eng Comput, 45(9), 887-900.
-
Reinkensmeyer D.J., Pang C.T., Nessler J.A., & Painter C.C. (2002). Web-based telerehabilitation for the upper extremity after stroke. IEEE Trans Neural Syst Rehabil Eng, 10(2), 102-108.
-
Whitall J., McCombe W. S., Silver K.H., & Macko R.F. (2000). Repetitive bilateral arm training with rhythmic auditory cueing improves motor function in chronic hemiparetic stroke. Stroke, 31(10), 2390-2395